Forschungsgebiete
- Intelligent Control – Reinforcement Learning
- Aktive Schwingungsminderung
- Robuste adaptive Regelung – Gleitregimeregelung
- Roboterlokalisierung, -bewegungsplanung und -steuerung
- Disturbance Rejection Control
- Back Analysis
- Full Waveform Inversion
- Structural Health Monitoring
- Weitere Forschungsgebiete
Intelligent Control – Reinforcement Learning
The application of Artificial Intelligence (AI) and Reinforcement Learning (RL) techniques has recorded a tremendous interest in recent years. The idea of learning and optimizing from experience could be effectively used and verified in control strategies in simulation. Yet the execution of these techniques directly in real-life applications can be challenging due to the presence of uncertainties and disturbances. Our aim is to develop and implement concepts from AI and RL to design effective control strategies and test them in actual systems in our lab. The inverted pendulum (IP) system is one of the most popular benchmark devices to test new control algorithms. An RL-based control strategy coupled with a PID controller is tested to swing up and balance the linear IP in our lab. The RL Agent is trained in simulation before applying it to the real experimental system. Current work involves online training of the Agent using different algorithms.


Description of the figures
Left: Experimental set-up with the inverted pendulum
Right: Schematic of the control strategy where the Agent is trained in simulation and then deployed in the real system along with a PID controller to stabilize the balance.
Aktive Schwingungsminderung
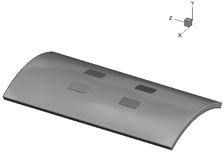
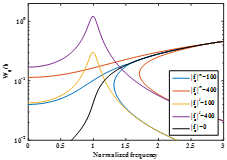
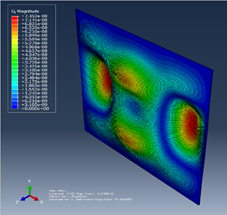
Aktive Schwingungsminderung (Active Vibration Control – AVC) ist ein relativ ausgereiftes Forschungsgebiet, das kontinuirlich mechanische und im Bauwesen befindliche Systeme auf Einwirkungen von ungewünschten Schwingungen aus der Umgebung untersucht. Eine Herausforderung in diesem Forschungsfeld ist die Verknüpfung von Modellierungsmethoden für diese Systeme (wie z.B. FE bsierte ordnungsreduzierte Modelle, oder noch wichtiger für echtzeit Anwendungen, Systemidentifikations-methoden) mit aktiven und semi-aktiven Regelungssystemen. Unsere Forschung auf dem Gebiet richtet sich unter anderem auf die Untersuchung des nichtlinearen Verhaltens der Strukturen mit dem Ziel der Qualifizierung von Unsicherheiten. Auf diese Weise können aus der Systemidentifikation im Zeit- und/oder Frequenzbereich enthaltene lineare Modelle verbessert werden. Als Ergebnis können weniger konservative modellbasierte Regelungsmethoden entforfen werden, die AVC Probleme auf eine effiziente Weise lösen.
 |
 |
 |
Robuste adaptive Regelung – Gleitregimeregelung
Gleitregimeregelung (auch Gleitmodusregelung oder Sliding-Mode-Regelung) wird dank ihrer Robustheit gegenüber Unsicherheiten und externen Störungen oft für die Regelung der linearen oder nichtlinearen Systeme mit Modellierungsunsicherheiten verwendet. Jedoch zeichnet sich diese Regelungsmethode auch durch einige Nachteile wie zum Beispiel: das sogenannte Chattering Problem (Rattern); anspruchsvolle Verfahren für die Ermittlung der oberen Grenze der unbekannten Störung oder Unsicherheit, sowie eine langsame Konvergenz. Um diese Nachteile zu bewältigen, schlagen wir eine neuartige Gleitregimeregelung vor, in welcher wir die Gleitebene und die Erreichbarkeit des Gleitregimes verbessern, sowie indem wir die Gleitregimeregelung mit anderen Regelungen hybridisieren wie z.B. mit Backstepping-Reglern, Neuronale-Netzwerk-Reglern, PID Reglern. Damit verbessern wir die Performanz und lindern das Rattern.
Robotische Manipulatoren spielen eine wichtige Rolle in mehreren industriellen Zweigen und dienen als interessanter Benchmark in der Entwicklung und Bewertung von neuen nichtlinearen Regelungen. Der Hauptzweck der Robotersteuerung ist, den Trajektorie-Fehler des robotischen Manipulators zu reduzieren. Allerdings degradieren die Komplexität der Dynamik, Nichtlinearitäten, Modellierungsunsicherheiten, und Störungen die Tracking-Performance der Roboter. Deshalb wird für die Implementierung unserer neuartigen Gleitregimeregelung auch ein robotischer Manipulator als Benchmark für die Evaluierung und Validierung der Effektivität der Regelung verwendet.



Beschreibung der Abbildungen
Links: Modelle der robotischen Manipulatoren, Eigentum der Industrial University of Hi Chi Minh, Vietnam
Mitte: Tracking-Performanz eines gelenkartigen Manipulators. Der Regler können gute Tracking-Performanz erreichen und der Manipulator kann den gewünschten Profilen nach unterschiedlichen transienten Zeiten folgen.Rechts: Stellgröße – Drehmoment der Manipulatorgelenke. Im Vergleich mit konventionellen Gleitregelungssystemen zeichnet sich das Ergebnis durch reduzierte Schwankungen der Stellgroße und durch die Eliminierung des Ratterns.
Roboterlokalisierung, -bewegungsplanung und -steuerung
Auf dem Gebiet der Robotik sind die Fragen Wo bin ich? Wo soll ich mich befinden? und Wie kann ich dort hinkommen? sehr herausfordernd, vor allem in einer dynamischen und engen Umgebung. Im Fokus dieser Forschung sind mobile Roboter, da eine solide Basis für deren Weiterentwicklung vorliegt, und die für die Prototypentestungen von Sensordatenfusion, sowie Bewegungsplanung und -steuerung oft verwendet werden. Dadurch, dass jeder Sensor eine begrenzte Genauigkeit hat, ist es üblich, Sensordaten zu fusionieren um eine verlässliche Abschätzung der Roboterzustände wie den Ort, die Geschwindigkeit oder die Beschleunigung zu erhalten. Zum Beispiel, die Rad-Odometrie ist in niedrigen Geschwindigkeits-bereichen dem Schlupf und geringer Genauigkeit ausgesetzt, während GNSS nicht im Inneren anwendbar ist sowie in Gebieten, in welchen die Signale nicht kontinuierlich empfangen werden können. Während für die Zustandsbeobachtung üblicherweise stochastische Ansätze basierend auf dem Extended Kalman Filter oder dem Unscented Kalman Filter verwendet werden, ist der Aufbau einer flexiblen Bibliothek, die ein beliebiges Sensorprofil für Fusionszwecke aufnehmen kann und gleichzeitig eine gewisse Genauigkeit garantiert, immer noch eine Aufforderung. Dieses Thema wird aktiv in unserem Labor erforscht. Dazu wird das Problem der Bewegungsplanung behandelt: für eine gegebene Ausgangslage des Roboters, sowie für die Zielposition und die geometrische Beschreibung des Roboters und dessen Umgebung, soll ein Pfad gefunden werden, auf welchem der Roboter vom Start zum Ziel kommt, ohne Hindernisse zu berühren. Obwohl das Problem der Bewegungssteuerung in der wirklichen Welt definiert ist, existiert es in einem anderen Raum, nämlich dem Konfigurationsraum. Die Forschung in Trajektorienplanung und Bewegungsregelung wird durch die Kombinationen aus nichtlinearen Echtzeitoptimierungen und robusten/nichtlinearen Bewegungs-steuerungen in unserem Labor intensiv behandelt.


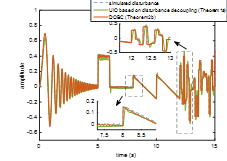
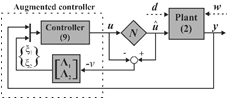
Disturbance Rejection Control
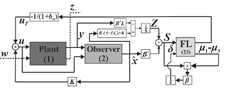
Unbekannte Eingangssignale wie Messrauschen, Eingangs-/Ausgangsstörungen und Modellierungs-unsicherheiten sind als Hauptquellen der Verschlechterung von Systemleistung in moderner Regelungstheorie bekannt. Robuste Regelungsmethoden als primäre Methoden für die Lösung dieser Fragestellungen basierend auf worst-case Analysen scheinen zu konservativen Ergebnissen zu führen. Beobachtung des unbekannten Inputs (Unknown input observation UIO) und Schätzung der Störungen (disturbance estimation) stellen weniger konservative Ansätze dar, die Störungen simultan erkennen und beseitigen können. Wir entwickeln DRC (Disturbance Rejection Control) Methoden für lineare und nichtlineare Zeitinvariante Systeme basierend auf Kombination von Störungsentkopplung Methoden und UIO. Diese Methoden können infolge der Einschränkungen der Aktoren zum nichtlinearen Verhalten wie z.B. Actuator Windup führen, was eine zusätzliche Herausforderung darstellt.
 |
 |
 |
Back Analysis
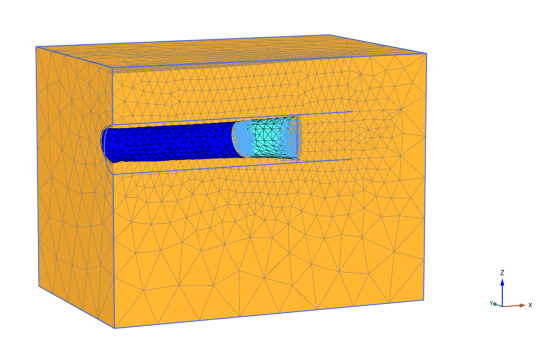
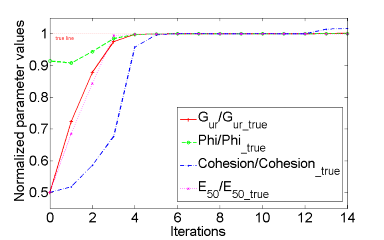
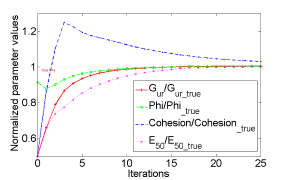
Back Analysis oder auch inverse Analyse ist ein Ansatz zur Lösung des modellbasierten Inversionsproblems in den Geoingenieurwissenschaften, um Bodenparameter aus Messungen der vorhandenen Zustandsvariablen, meist Setzungen, zu ermitteln. Obwohl lange bekannt, ist diese inverse Analyse, die auf Modellaktualisierung basiert, um die Differenz zwischen Modellausgängen und Messdaten zu minimieren, in geotechnischen Projekten nicht oft implementiert worden, vor allem infolge des hohen Rechenaufwands für die Ausführung der äußerst hohen Anzahl von elasto-plastischen finiten Elementen (FE) Vorwärtsanalysen, die einige Optimierungsmethoden benötigen. Wir entwickeln die Methoden für die Lösung des Inversionsproblems im maschinellen Tunnelbau, die auf Extended Kalman Filter (EKF), Unscented Kalman Filter (UKF) und Particle Filter (PF) basieren. Effizienzanalyse zeigt, dass für die inverse Analyse im maschinellen Tunnelbau EKF und UKF äußerst gut geeignet sind, denn im Gegensatz zu anderen Optimierungsmethoden, sie benötigen eine geringe Anzahl der FE Vorwärtsanalysen, um zu konvergieren. Dank dieser Effizienz können anspruchsvolle elasto-plastische FE-Modelle für die Ausführung der inversen Analyse eingesetzt werden, ohne approximierte Ersatzmodelle bilden zu müssen. Ein anspruchsvolles 3D FE Modell, sowie die effiziente Konvergenz von EKF und UKF sind unten dargestellt.
 |
 |
 |
Full Waveform Inversion
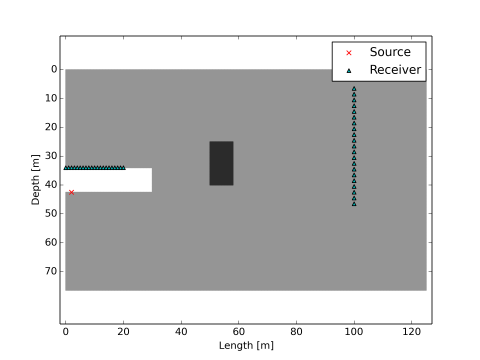
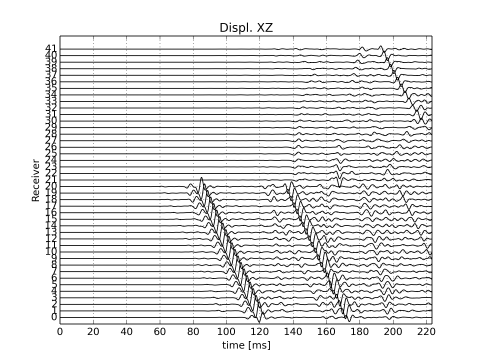
Die Bestimmung der inneren Struktur von Materialien spielt in diversen Forschungsfeldern eine wichtige Rolle, so zum Beispiel in der Mechanik, im Bauingenieurwesen, in der Geophysik oder in der medizinischen Bildgebung. Um die räumliche Verteilung der Materialeigenschaften in einer zerstörungsfreien Art und Weise herauszufinden, können Methoden angewendet werden, die auf Wellenausbreitung beruhen. Dabei werden seismische Wellen angeregt und die Signalantwort gemessen und ausgewertet. Eine Full Waveform Inversion (FWI) ist eine Methodologie, welche genutzt wird, um hochauflösende Rekonstruktionen zu generieren, indem – wie auch der Name sagt – das gesamte gemessene Signal für die Inversion genutzt wird. Unsere Forschung fokussiert sich auf eine Anwendung zur Vorauserkundung im maschinellen Tunnelbau, wobei seismische Wellen aus dem Tunnel heraus oder von der Erdoberfläche aus angeregt werden und die Signalantworten genutzt werden, um den Bereich vor der Ortsbrust zu erkunden. Unsere FWI-Methoden basieren auf einer Optimierung mit Bayesschen (statistischen) Methoden statt mit den sonst üblichen gradientenbasierten Methoden (sogenannte Adjoint-Methoden). Dabei werden hybride Methoden genutzt, welche auf Kombinationen des Unscented Kalman Filters (UKF) mit Simulated Annealing (SA) oder der parametrischen Level-Set Methode (PaLS) beruhen. Auf den Bildern unten lässt sich erkennen, wie unsere Methode UKF-PaLS in der Lage ist, eine rechteckige Störung auf Basis von synthetisch generierten Messungen zu rekonstruieren. Außerdem werden die aufgenommenen Wellenformen in vertikaler Richtung gezeigt.
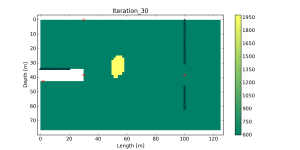
Zusätzlich zur numerischen Validierung validieren wir unsere Methoden auch experimentell. Da Daten von einer echten Tunnelbaustelle schwierig zu bekommen sind, wurde ein kleinskaliges Laborexperiment entwickelt, in welchem Ultraschalldaten auf der Basis von Laserinterferometrie akquiriert werden. Indem kleinskalige Proben untersucht werden, welche eine gewisse Ähnlichkeit zu den großskaligen Tunnelmodellen aufweisen, werden unsere Methoden validiert und für eine Anwendung im Bereich des maschinellen Tunnelbaus vorbereitet. Das Bild links unten zeigt nochmals Ergebnisse einer numerischen Validierung, wobei die Grautöne die rekonstruierte Struktur zeigen und wobei die schwarz gestrichelten Linien die wahre Geometrie zeigen. Die Ergebnisse machen deutlich, dass die die Methoden generell in der Lage sind, hochpräzise Rekonstruktionen des Untergrundes zu erzeugen. Das mittlere Bild zeigt eine Probe, welche mit dem Ziel konstruiert wurde, gewisse Ähnlichkeiten zu einem großskaligen Modell zu haben. Das rechte Bild zeigt die Rekonstruktion des Querschnitts der Probe, wobei die erwartete wahre Geometrie wieder mithilfe der schwarz gestrichelten Linien verdeutlicht wird. Auch hier wurden sehr zufriedenstellende Ergebnisse erreicht, was das Potential der Methoden für eine Anwendung im maschinellen Tunnelbau unterstreicht.



Structural Health Monitoring
Structural Health Monitoring (SHM) is the continuous assessment of structural integrity using sensors that are permanently installed. Furthermore, SHM enables condition-based structural maintenance to replace the current inefficient schedule-based maintenance practice. This technique frequently comprises (1) examining the structure, (2) extracting damage-sensitive features, and (3) developing appropriate approaches for reaching final conclusions on the occurrence of any damage, its location, and severity.
Our research aims to investigate and create unique algorithms that make a SHM scheme more resilient and practical.
Damage detection in thin plates is being researched for this purpose using ultrasonic wave propagation principles. A variety of approaches, ranging from triangulation-based methods such as delay and sum to machine learning-based algorithms, are being developed and evaluated toward this end.



Description of the figures
Left: Seprability of damage scenarios after and before our introduced method by reducing the dimension of the input signal to two.
Middle: Experiment - a layout of the ultrasonic testbench using piezopatches and TiePie DAQ.
Right: Detected damage location by DaS algorithm and the actual damage coordinate.
We also develop methods of active structural health monitoring and damage detection in concrete structures using piezoelectric smart aggregates and damage assessment based on damage indices obtained through wave propagation.
This includes the simulation and experimental investigation of different concrete models. Excited waves are propagated through structures and observed at different observation points. Postprocessing of the acquired signals provides the information on the damage existence and location.
Our methods include damage detection both in the 2D models and 3D models. Abaqus software is used for the numerical simulation, while the postprocessing of the acquired signals is performed by coupling MATLAB and Python codes. Experimental investigation is performed in the in the MAS laser laboratory using the non-destructive laser examination (ultrasonic range).



Description of the figures: Damage localization in 2D concrete plates


Description of the figures
Left: wave propagation in a concrete beam. Right: piezoelectric smart aggregates
Weitere Forschungsgebiete
- Durchgängiger Entwurf intelligenter adaptiver Strukturen und Systeme
- Reglerentwurf für aktive Schwingungsreduktion (robuste adaptive Regelung)
- Echtzeitregelung und Simulation von Hardware-in-the-Loop Systemen
- Maschinelles Lernen / künstliche neuronale Netzwerke
- Modell- und Parameteridentifikation (numerisch und experimentell)
- Active Structural Acoustic Control
- Maschinendiagnose
- Structural Health Monitoring / Zerstörungsfreie Prüfung
- Welleninversionsbasierte Vorauserkundungsmethoden
- Statistische Parameteridentifikation
- Laserbasierte Ultraschallprüfung